Jumeau numérique d'un portail coulissant
Ce jumeau numérique permet la programmation en Python d'une maquette réelle d'un portail coulissant.
Maquette réelle
Il y a 3 déclinaisons de la maquette réelle :
- Version auto-construite avec des modules Grove réalisable à partir de plaque de 3 mm (découpe laser) et d'impression 3D
- Version auto-construite avec des modules Grove réalisable à partir de plaque de 10 mm (découpe laser) et d'impression 3D
- Version avec des modules AutoProg fournie par l'entreprise A4 technologie
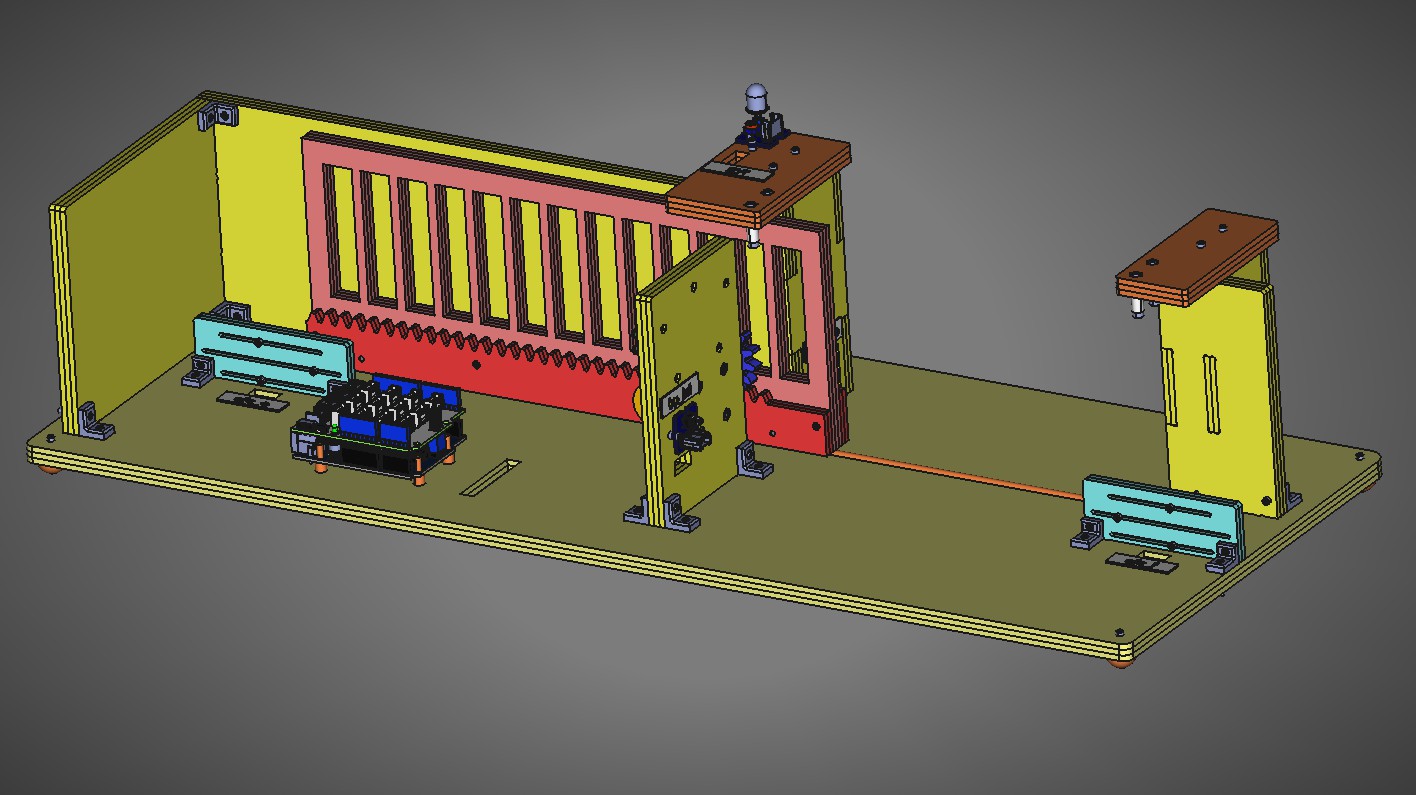
Maquette numérique
La maquette numérique est basée sur le modèle 3D de la maquette développée par l'entreprise A4 technologie. Les documents techniques et pédagogiques signés A4 Technologie sont diffusés librement sous licence Creative Commons BY-NC-SA.
Site internet de la maquette A4 Technologie : https://www.a4.fr/wiki/index.php?title=Portail_coulissant_(BE-APORT-COUL)
Téléchargement
Les binaires (Game Engine Runtime) sont hébergés sur phroy.org.
Instructions
Le script Python qui permet la commande du portail est le fichier 'porcou_cmd.py'. Il est éditable avec tout éditeur (Spyder, Emacs, Pulsar, ...).
Actions
Les actions (ordre = True ou False) sont :
- Gyrophare : gyr(True | False)
- Ouvrir le portail (moteur sens trigo) : mot_o (True | False)
- Fermer le portail (moteur sens horaire) : mot_f (True | False)
- Emetteur pour le capteur barrage IR : ir_emet(True | False)
Capteurs
Les compte-rendus (valeur retournée = True ou False) des capteurs sont :
- Capteur fin de course portail ouvert : fdc_o()
- Capteur fin de course portail fermé : fdc_f()
- Capteur barrage IR (absence d'obstacle) : ir_recep()
Pupitre
Les consignes (valeur retournée = True ou False) du pupitre sont :
- Bouton poussoir coté rue : bp_ext()
- Bouton poussoir coté cour : bp_int()
Gestion du temps
- Temporisation : tempo(duree) avec la durée en seconde.
- Réinitialiser la valeur du temps : reset_t().
- Obtenir la valeur du temps en seconde depuis le démarrage du cycle : get_t().
- Définir la valeur (x) du temps en seconde : set_t(x).
Accès aux données
- Retourne la valeur de la variable à l'instant : get(variable).
- Enregistre les données et génére un fichier de données CSV à l'arrêt du cycle : daq([variables]).
- Affiche, à l'arrêt du cycle, le chronogramme des données enregristrées : plot([variables]).
Variables publiques :
- Entrées/sorties : 'bp_ext', 'bp_int', 'fdc_o', 'fdc_f', 'mot_o', 'mot_f', 'gyr', 'ir_emet' et 'ir_recep'.
- Variables réels (si il y a jumelage) : 'bp_ext_r', 'bp_int_r', 'fdc_o_r', 'fdc_f_r' et 'ir_recep_r'.
- Autres variables : 't' (temps), 'mot_angle', 'mot_vitesse', 'portail_x' et 'portail_vitesse'.
Jumelage
- Démarrer le jumelage : jumeau(brochage).
- Arrêter le jumelage : jumeau_stop().
- Définit les modes d'activation des entrées/sorties (True ou False) : jumeau_mode(entrées réelles, entrées numériques, sorties réelles, sorties numériques).
Brochage
Le brochage est un dictionnaire qui permet d'associer les objets 3D du jumeau numérique aux broches du jumeau réel.
Son format est le suivant : brochage = { nom:[type, broche, mode] } :
- nom : nom de l'objet 3D du jumeau numérique,
- type : a (analogique) ou d (binaire),
- broche : numéro de la broche de carte (Arduino, ...),
- mode : i (entrée), o (sortie) ou p (pwm).
Objets 3D du jumeau numérique :
- Entrées/sorties : 'bp_ext', 'bp_int', 'fdc_o', 'fdc_f', 'mot_o', 'mot_f', 'gyr', 'ir_emet' et 'ir_recep'.